Mã tài liệu: 264193
Số trang: 14
Định dạng: zip
Dung lượng file: 3,052 Kb
Chuyên mục: Kỹ thuật cơ khí
BÀI TẬP ROBOT SỐ 2
(Đề số 5)
ĐỀ BÀI:
Cho một Robot 2 thanh nối được truyền động bởi động cơ một chiều . Động cơ một chiều được cấp điện từ 1bộ khuyếch đại điện áp.
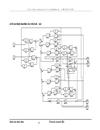
1.Xây dựng mô hình Simulink để xác định các phản ứng của Robot với các mô men đầu vào M1(t) và M2(t).
2.Thiết kế bộ điều khiển PID độc lập cho từng khớp.
3.Mô phỏng hệ thống với bộ điều khiển ở câu 2.
Số liệu của Robot:
Chiều dài thanh 1 (l) :0.4 (m)
Chiều dàI thanh 2 (l) : 0.2 (m).
Khối lượng thanh nối 1 ( m1) : 21.8 (Kg).
Khối lượng thanh nối 2 (m2) : 15 (Kg).
Hằng số mô men của khớp 1,2 ( KM ) : 0.1 (Nm/A).
Điện trở phần ứng (r1,r2) : 0.3 (Om).
Tốc độ lớn nhất của động cơ khớp 1,2 ( max ) : 90 (rad/s).
Khối lượng lớn nhất ( m1 ) : 5 (Kg).
Tỉ số truyền cho cả 2 khớp ( i ) `: 30.














Những tài liệu gần giống với tài liệu bạn đang xem
Những tài liệu bạn đã xem
 Bài tập ROBOT số 2
BÀI TẬP ROBOT SỐ 2 (Đề số 5) ĐỀ BÀI: Cho một Robot 2 thanh nối được truyền động bởi động cơ một chiều . Động cơ một chiều được cấp điện từ 1bộ khuyếch đại điện áp. 1.Xây dựng mô hình Simulink để xác định các phản ứng của Robot với các mô men đầu
zip Đăng bởi
thunguyen710
Bài tập ROBOT số 2
BÀI TẬP ROBOT SỐ 2 (Đề số 5) ĐỀ BÀI: Cho một Robot 2 thanh nối được truyền động bởi động cơ một chiều . Động cơ một chiều được cấp điện từ 1bộ khuyếch đại điện áp. 1.Xây dựng mô hình Simulink để xác định các phản ứng của Robot với các mô men đầu
zip Đăng bởi
thunguyen710