

Mã tài liệu: 187727
Số trang: 33
Định dạng: docx
Dung lượng file:
Chuyên mục: Âm nhạc học
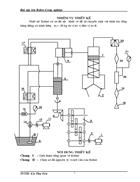
Chương I : Giới thiệu tổng quan về Robót
Chương II : Chọn sơ đồ nguyên lý và kết cấu của Robot
Chương III : Chọn sơ đồ và tính toán hệ thống truyền động cơ khí để quay thân Robot một góc
Chương IV : Chọn sơ đồ và tính toán hệ truyền dẫn thuỷ lực theo phương Z và đẩy tay máy theo phương R trong hệ toạ độ trụ M (r, , z)
Chương V : Chọn sơ đồ và tính toán hệ truyền động khí n
Chương VI : Tính lực momen quán tính các khâu của tay máy
Chương VII : Lập và giải bài toán thuận nghịch để tính vị trí và chuyển vị của tay máy
Chương VIII: Thiết kế hệ thống điều khiển
Chương I : Giới thiệu tổng quan về Robót
Những tài liệu gần giống với tài liệu bạn đang xem
Những tài liệu bạn đã xem
 Robot Công nghiệp 1
Chương I : Giới thiệu tổng quan về Robót Chương II : Chọn sơ đồ nguyên lý và kết cấu của Robot Chương III : Chọn sơ đồ và tính toán hệ thống truyền động cơ khí để quay thân Robot một góc Chương IV : Chọn sơ đồ và tính toán hệ truyền dẫn thuỷ lực
docx Đăng bởi
changkiki119
Robot Công nghiệp 1
Chương I : Giới thiệu tổng quan về Robót Chương II : Chọn sơ đồ nguyên lý và kết cấu của Robot Chương III : Chọn sơ đồ và tính toán hệ thống truyền động cơ khí để quay thân Robot một góc Chương IV : Chọn sơ đồ và tính toán hệ truyền dẫn thuỷ lực
docx Đăng bởi
changkiki119
















